Mettersi nei guai da soli a volte può essere un ottimo passatempo, semplice masochismo o necessità; il mio caso è l'ultimo. Volendo dotare Eloise di una gimbal per Gopro e avendo budget ridotto ed esigenze modeste ho dovuto combattere non poco per trovare qualcosa che facesse al mio caso. Ormai tutte le gimbal in commercio sono per la Gopro hero 3, molto differente dalla mia hero e basta ormai datata ... ma questa ho e tutte quelle con una meccanica che potrebbe ospitarla sono di grosse dimensioni o di grosso costo.
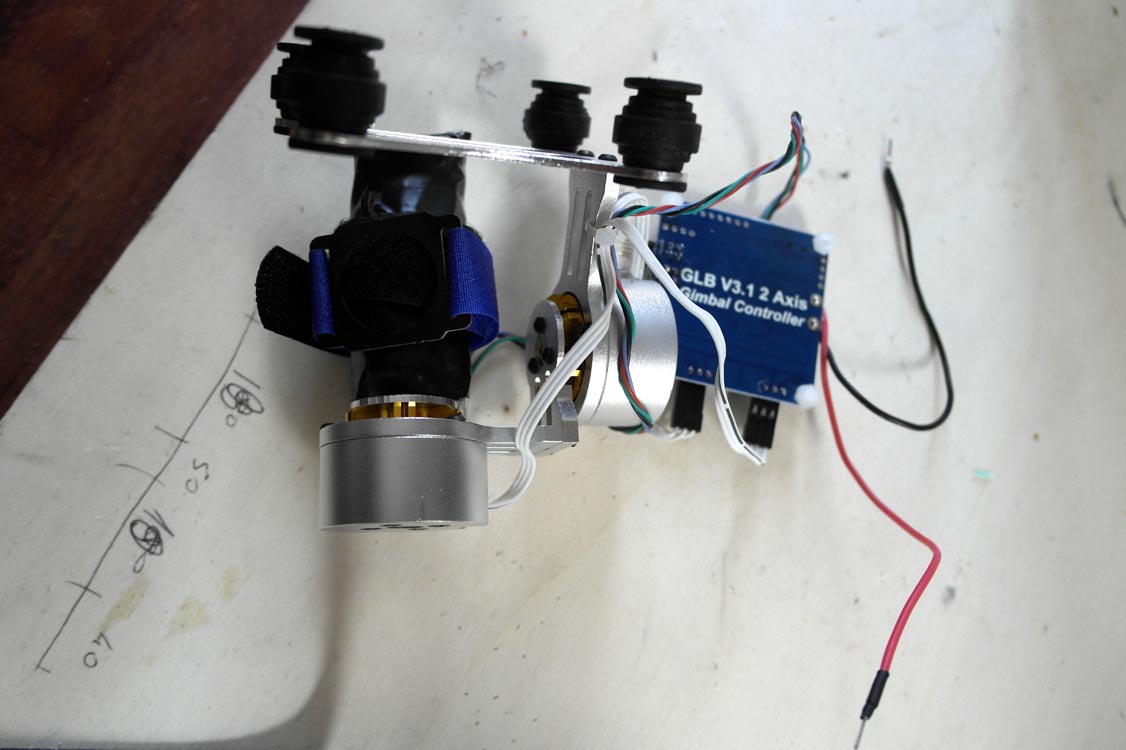
L'occasione si è presentata acquistando da acquirente insoddisfatto una cinesissima 2 assi con controller AlexMos (SimpleBGC) sotto i 100 euri. Sapevo già a cosa sarei andato incontro... Era ancora inusata, imballata con odore di magazzino con muffa preamboli che solitamente non sono di grande auspicio per la qualità di un prodotto. Venduta come pronta all'uso in realtà è pronta a causare mal di testa a chiunque non abbia un po' di dimestichezza con questi controller. Il firmware originale è una versione 2.3 SimpleBGC, ora siamo alla 2.5 e quindi spererei di risolvere un po' di problemi già con un upgrade... illusioni.
Collegata alla batteria ha iniziato a vibrare come un martello pneumatico, cosa che mi ha fatto pensare che forse proprio pronta all'uso non era ma come dicevo ero preparato, così ho collegato il controller al pc e ho aperto la sua gui da cui dovrebbe essere possibile un upgrade... se il pc lo vedesse! Riconosciuto il dispositivo rimane in attesa di collegamento all'infinito. Linux stessa cosa, quindi torno a win e provo l'upgrade con Avrdude... l'avessi mai fatto... basta! E' scomparsa, non viene nemmeno più identificata.
La soluzioni potrebbero essere due: comprare una board controller nuova, magari una Martinez V3, oppure riuscire a caricare il firmware della Martinez che è opensource su questa. Prima soluzione scartata per mancanza di budget e per la seconda devo risolvere qualche problema. Il primo è che il controller non ha un connettore per caricare il firmware, il secondo che è domenica e io non ho un USBASP da usare come programmatore, il terzo è che sono compulsivo... se non sfrutto l'attimo rischio di trascinarmi un lavoro per giorni. L'unico problema difficilmente risolvibile è il terzo per gli altri due è abbastanza semplice.
La scheda del controller in questione ha già la predisposizione per la saldatura dei pin per l'AVR quindi in cinque minuti l'ho risolto. Il secondo è un po' più laborioso perchè ho dovuto usare un Arduino Nano Atmega 328 costruendomi il cavo a 6 pin per collegarmi alla porta del controller.
- La prima operazione da fare è collegare l'usb della scheda Nano e aprire una consolle Arduino (meglio se superiore a 1.0.5).Controllate che venga riconosciuto e correttamente collegato alla porta seriale
- caricate lo sketch ISP e flashatelo su Arduino
- Disconnettete tutto
- Riconnettete l'Arduino e collegatelo con il cavo a sei poli alla scheda della gimbal secondo lo schema(*)
- Aprite la consolle di Arduino e settatelo come USBasp
- Nello steso menù trovate il comando per caricare il bootloader, cliccatelo.
Se tutto è andato bene non dovreste ricevere messaggi di errore ma solo un "done", a questo punto potete scollegare Arduino Nano che avere usato come programmatore e interfacciarvi direttamente alla board della gimbal con la consolle Arduino per caricare finalmente il firmware Brugi ultima versione
All'interno della cartella troverete il file BruGi.ino che è il file da aprire per caricare in consolle tutti i file source da compilare. Se avete conoscenze o voglia di documentarvi potete entrare anche nello specifico, configurando anche parametri non modificabili dalla sua consolle che trovate in una cartella "GUI" nella root principale. Fantastico! Funziona e anche bene.. in soli 5 minuti di setup! Ricordatevi che per far funzionare la gimbal dovrete anche alimentarla, non basta l'alimentazione usb per alimentare i motori